
第69回宇科連での発表(ポスター発表2件、口頭発表1件)
2025年11月25日から28日に札幌市で開催される第69回宇宙科学技術連合講演会に、当研究室の矢入教授、秀島さん(修士課程1年)、松島さん(修士課程1年)が参加して口頭発表とポスター発表を行います。 矢入 健久: 宇宙 […]
2025年11月25日から28日に札幌市で開催される第69回宇宙科学技術連合講演会に、当研究室の矢入教授、秀島さん(修士課程1年)、松島さん(修士課程1年)が参加して口頭発表とポスター発表を行います。 矢入 健久: 宇宙 […]

2025年11月12日から15日まで那覇市で行われた第28回情報論的学習理論ワークショップに当研究室のメンバーが参加して、大坂さん(博士課程1年)がポスター発表を行いました。 大坂光(東京大学), 武石直也(東京大学),

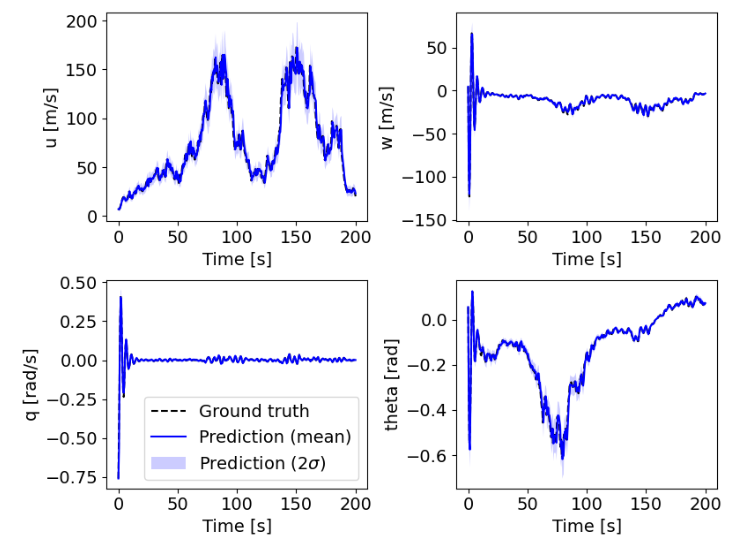
2025年9月に修士課程を修了した摂待陽生さんの論文が、2025年12月2日から7日にサンディエゴなどで開催される The 39th Annual Conference on Neural Information Pro
A Temporal Difference Method for Stochastic Continuous Dynamics (NeurIPS 2025) 続きを読む »
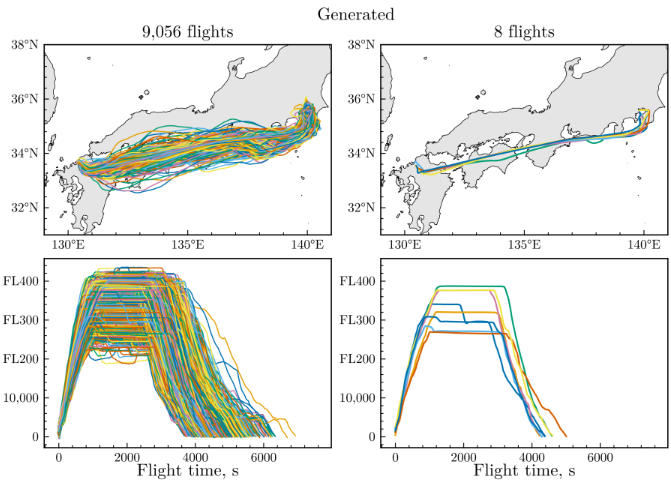
2025年3月に博士課程を終了した松田治樹さんの論文がTransactions of JSASSに採択されました。 Haruki Matsuda, Naoya Takeishi, Takehisa Yairi: High
2025年9月2日から5日に東京科学大学大岡山キャンパスで開催される日本ロボット学会学術講演会に、当研究室のメンバーが参加します。 川口 隆人, 武石 直也, 矢入 健久, キッティサレス サリン, 吉田 裕志: マルチ

2025年12月10日から12日にリオデジャネイロで開催される IEEE Conference on Decision and Control (CDC 2025) に論文が採択されました。 Koki Hirano, N
Probabilistic Safety for Hard-to-Formalize Constraints via Conformal Neural CBFs (CDC 2025) 続きを読む »

2025年7月12日から18日に徳島市で開催されるIternational Symposium on Space Technology and Scienceに、当研究室のメンバーが参加します。 Soat The Le,
2025年10月5日から8日にウィーンで開催される IEEE International Conference on Systems, Man, and Cybernetics (SMC 2025) に論文が採択されまし
Deterministic and Stochastic Hybrid Modeling with Regularization (SMC 2025) 続きを読む »
2025年5月27日から30日まで大阪市で行われる第39回人工知能学会全国大会に当研究室のメンバーが参加します。 [2M5-OS-37b-03] モデル化誤差が顕著な状況における制御のためのダイナミクス学習 [3K1-I
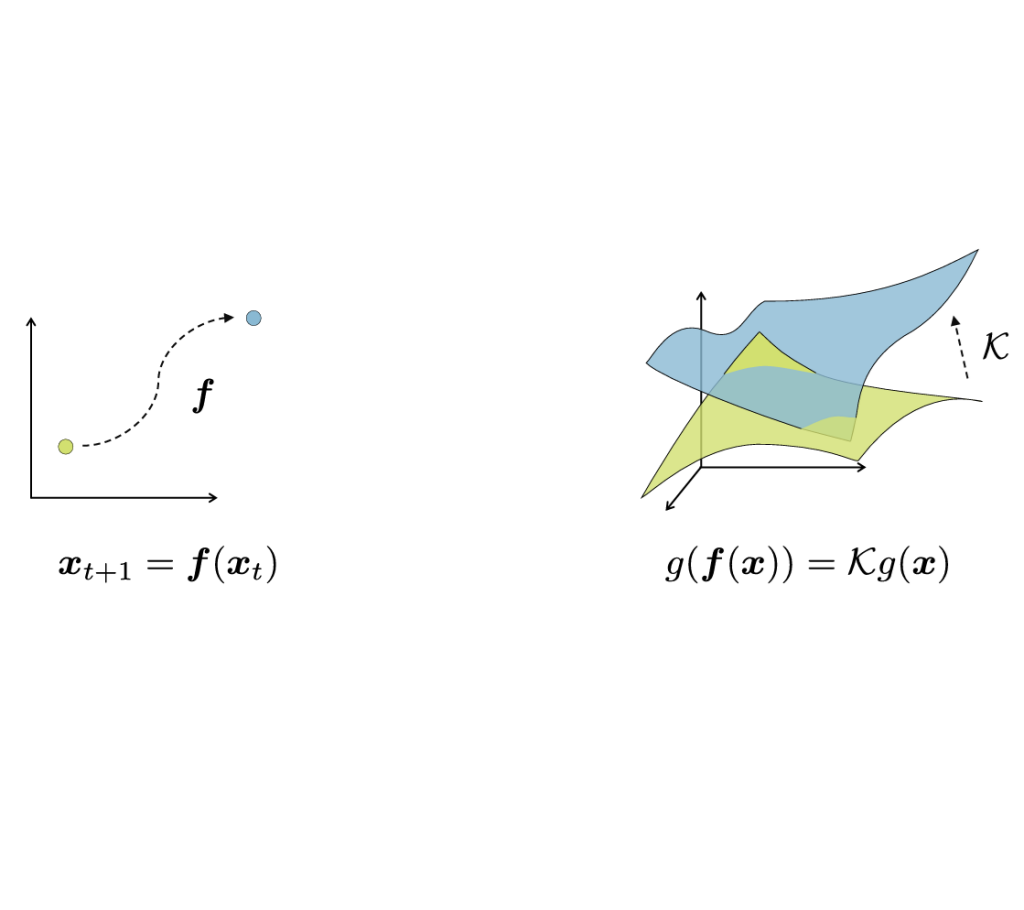
本研究室の武石直也講師が、ロボティクスに関する国際会議Robotics: Science and Systemsの中で開催されたワークショップ Koopman Operators in Robotics で招待講演を行い